Stopky
Milan Horkel
Zařízení STOPWATCH je časomíra určená pro měření časů průjezdu solárních robotů určenou dráhou. Kromě vlastního měření časů pomocí laserové závory na startu a cíli odesílá naměřený čas prostřednictvím sériové linky do nadřazeného počítače.

Technické údaje
| Parametr | Hodnota | Poznámka |
|---|---|---|
| Napájení | 9 až 15V | cca 40mA včetně laserů |
| Čidla | Start / Stop | Laser a fototranzistor |
| Měření času | Do 1000s | Rozlišení 1ms |
| Přenos dat | RS232 | Textový formát |
| Rozměry | 102 x 81 x 21 mm | Bez přečnívajících konektorů, výška nad základnou. |
Popis konstrukce
Úvodem
Časomíra je řízena jednočipovým procesorem U3 PIC16F84. K procesoru je přímo připojen dvouřádkový LCD modul pro zobrazení časů, piezo element pro akustickou indikaci a obvod MAX232 pro převod úrovní na sériovou linku RS232.
Napájení zajišťuje stabilizátor 7805 s ochrannou diodou. Pro napájení je možno použít libovolný stejnosměrný zdroj o napětí v rozmezí 9 až 15V. Celková spotřeba je cca 40mA. Větší část proudu teče do připojených laserových ukazovátek optické závory, vlastní spotřeba je cca 15mA.
Laserová optická závora
Vzhledem k tomu, že se soutěže solárních robotů odehrávají při velmi silném osvětlení bylo nutné použít pro optickou závoru dostatečně silného zdroje světla. Při použití LED diody by bylo nutné použít pomocné optiky a to by značně komplikovalo konstrukci. Proto byly použity jako zdroje světla laserová ukazovátka. V současné době jsou již laserová ukazovátka natolik levná, že stojí asi jako levnější lupa a navíc poskytují velmi intenzivní úzký paprsek, který se poměrně málo rozbíhá. Není pak problém asi se vzdáleností ani s okolním osvětlením.
Na přijímací straně je použit fototranzistor umístěný v kousku měděné trubky (stínění).
Optická závora s laserem je schopna detekovat všechny objekty tlustší než 1mm na vzdálenost několika metrů.
Laserová dioda
Samotná laserová dioda je neobyčejně choulostivá součástka, kterou lze velmi snadno zničit:
- Příliš intenzivním generovaným světlem
- Napětím v závěrném směru
- Přehřátím
Laserová dioda se zničí velmi rychle a stačí k tomu jediný impuls statické elektřiny, proto pozor při pájení. Je lépe použít mikropáječku místo oblíbené pistolové páječky. Kromě toho při přetížení se velmi zkracuje životnost diody. Při příliš velkém proudu se dioda „vysvítí“ za pár desítek sekund. Patrně hlavním místem, kde dochází k poškození je plocha, kde generované světlo vystupuje z čipu laserové diody. Tato plocha je rozměru řádu setin až desetin milimetru a je pokryta speciální vrstvou, která se chová jako polopropustné zrcadlo.
Proto je vhodné použít už hotové laserové ukazovátko (které je navíc levnější než samostatně koupená laserová dioda, o optice nemluvě). Některá laserová ukazovátka mají v sobě ochranný obvod s tranzistory ale jiná mají v sobě jen omezovací odpor a je tedy lepší na ochranu vůbec nespoléhat. Z ukazovátka odstraníme tlačítko a vstup napájení (tam kde byla připojena baterie, ne přímo na diodě) pro jistotu překleneme keramickým kondenzátorem 100nF. Původní ochranné obvody nebo omezovací odpor v ukazovátku ponecháme.
Na desce časomíry je omezovací odpor a trimr, kterým se nastavuje proud laserem. Proud je vhodné nastavit kousek nad úroveň, kdy dioda začne laserovat. To se pozná podle toho, že při postupném zvyšování proudu dioda zpočátku svítí jen velmi málo ale po překročení prahového proudu se při dalším zvětšování proudu začne velmi rychle zvyšovat intenzita generovaného světla. Pro běžné laserové diody z ukazovátek je prahový proud řádu 10 až 20mA.
Prahový proud se mění s teplotou a dioda se obvykle nezničí proudem ale příliš silným generovaným zářením. Proto doporučuji nastavit proud na maximálně cca 1.5 násobek prahového proudu aby ani při změně teploty nedošlo ke zničení laserové diody.
Mechanická konstrukce závory
Fotototranzistor opatrně připájíme na třípinový hřebínek a ten i s diodou připájíme na konec měděné trubičky vhodného průměru. Já jsem použil 5cm dlouhý kousek chladírenské trubičky o vnějším průměru 6mm. Konec trubky ve opatřen zářezem (na šířku plochého pilníku) do kterého je konektorový hřebínek zapájen. Konektor je k trubce ještě přilepen kapkou rychlého epoxidového lepidla.
Z laserového ukazovátka opatrně vykucháme vnitřek (v novějších ukazovátkách je vnitřek vlepen do trubky ukazovátka), odstraníme tlačítko, mikropáječkou připájíme ochranný kondenzátor a přívodní konektor. Konektor opět přilepíme rychlým epoxidovým lepidlem aby byl mechanicky dobře fixovaný a nakonec přes celé ukazovátko přetáhneme smšťovací bužírku (laser má obvykle na kostře plus).
Mechanické umístění a nasměrování čidel je již věcí uživatele. Jako základnu lze použít kousek ocelové páskoviny ze spodní strany opatřené třemi nožičkami. Lasery jsou na jedné straně nastavitelné pomocí šroubu pro nasměrování ve svislém směru. Více napoví obrázky.




Celá časomíra může být složena do cestovního balení. Kabely pro fototranzistory je vhodné použít stíněné, pro lasery to není třeba.

Mechanická konstrukce
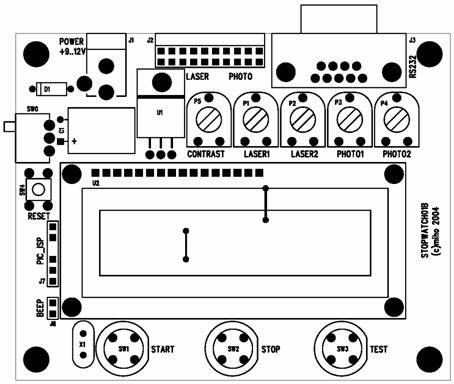
Časomíra je realizována na jednostranné desce plošného spoje a částečně osazena SMD součástkami. Pod displejem jsou 2 drátové propojky a přilepený piezo element.
Programovací hřebínek J7 je zahnutý směrem k okraji desky, vypínač SW0 rovněž.
Stabilizátor a elektrolytický kondenzátor je osazen naležato.
Displej je přišroubován čtyřmi šrouby M2.5 k desce. Pro vymezení vzdálenosti displeje od plošného spoje se použijí distanční sloupky dlouhé 5mm. Hřebínek displeje se pájí až po přišroubování displeje.
Konektor pro připojení čidel je upravený takto:
- Na dvojice pinů 1-2, 11-12 a 19-20 jsou nasazeny a připájeny juperové propojky
- Dvojice pinů 7-8 je uštípnutá a slouží jako klíč pro připojení laserů.
Při programování procesoru musí být čidla neaktivní. Pokud nejsou čidla připojená je nutné buď nastavit trimry P3 a P4 úplně vlevo nebo místo čidel dát na vstupy zkratové propjky.
Schéma zapojení
Srdcem zařízení je procesor U3 PIC16F84. Tento konkrétní typ jsem zvolil protože jsem jej měl v šuplíku ale po přeložení je možné použít i jiný typ procesoru PIC v pouzdru s 18 vývody. Procesor je možné naprogramovat přímo v zapojení pomocí ISP konektoru J7 a zresetovat tlačítkem SW4. Procesor běží na 4.0MHz.

Piezo element je přímo přilepený na plošný spoj pod LCD displejem. Pod elementem je vhodné vyvrtat otvor skrz plošný spoj (pozor na spoje) o průměru cca. 2mm a piezo element přilepíme prostřednictvím mezikruží z oboustranně lepící samolepky na plošný spoj.
Napájení zajišťuje stabilizátor U1 s ochrannou diodou D1, která chrání časomíru před přepólováním.

K procesoru je připojen dvouřádkový LCD displej U2 pro zobrazení naměřených časů a piezo element (na konektor J6) pro akustickou indikaci. Displej se kupuje na www.hw.cz s označením SC1602A ale je možné přímo použít libovolný dvouřádkový LCD modul, který bude na plošný spoj pasovat a bude používat „standardní“ Hitachi řadič. Kontrast se nastavuje trimrem P5.

Komunikaci s osobním počítačem probíhá prostřednictvím rozhraní RS232. Napěťové úrovně převádí obvod U4 MAX232. Komunikace nevyužívá hardwarového řízení toku dat.

Pro zjištění průjezdu robota startem a cílem je použita laserová závora sestávající z laserového ukazovátka jako zdroje světla na jedné straně a fototranzistoru na straně protější. Laserové ukazovátko je napájeno z časomíry přes odpor R1+P1 a R2+P2 pro nastavení pracovního proudu.
Příjem signálu z fototranzistorů zajišťují zesilovače s tranzistory Q1 a Q2. Trimry P3 a P4 slouží pro nastavení rozhodovací úrovně pro rozlišení světla a tmy. Pro snadné nastavení slouží testovací režim při kterém časomíra vydává tón po dobu přerušení jednoho z paprsků. Kondenzátor C4 a C5 slouží k omezení případného vstupujícího rušní.
Časomíru je možné také ovládat ručně prostřednictvím tlačítek SW1 a SW2. Tlačítko SW3 slouží pro spuštění testovacího režimu (testuje se jen při zapnutí aby se nemohlo stát, že bude testovací režim spuštěn omylem).

Osazení a oživení
Osazení

| Reference | Hodnota |
|---|---|
| Odpory | |
| R1, R2, R3, R4, R6, R7, R14 | 100 |
| R10 | 1k |
| R5, R8, R9, R11, R12, R13 | 10k |
| Odporové trimry | |
| P1, P2 | 250/PT10MVE250 |
| P3, P4, P5 | 10k/PT10MVK010 |
| Kondenzátory | |
| C8, C9 | 22pF |
| C4, C5 | 33nF |
| C2, C3, C6, C7, C10, C11, C12, C13, C14 | 100nF |
| C1 | 1000uF/16V |
| Diody | |
| D1 | 1N4007 |
| Tranzistory | |
| Q1, Q2 | BC846SMD |
| Integrované obvody | |
| U1 | 7805 |
| U2 | LCD_SC1602A |
| U3 | PIC16F84/SO |
| U4 | MAX232SMD (úzký) |
| Krystaly | |
| X1 | QM4.0MHz |
| Mechanické součásti | |
| J1 | K375A |
| J2 | JUMP2X10_90 |
| J3 | CANNON9M_90 |
| J6 | JUMP2 |
| J7 | JUMP6 |
| SW0 | P-B143 |
| SW1, SW2, SW3 | P-DT6BL |
| SW4 | P-B1720 |
| Konstrukční součásti | |
| 5ks | JUMPER |
| 4ks | Šroub M2.5x8, válcová hlava |
| 4ks | Matice M2.5 |
| 4ks | Matice M3 |
| 4ks | Šroub M3x12, křížový, válcová hlava |
| 4ks | Podložka M3 |
| 4ks | Sloupek M3x5 |
Oživení a nastavení
Nejprve kontrolujeme napájecí napětí za stabilizátorem (+5V). Po naprogramování procesoru by měla časomíra ožít. Místo fototranzistorů provizorně dáme propojky a otestujeme, zda časomíra reaguje na tlačítka START a STOP a zda posílá data prostřednictvím rozhraní RS232.
Nastavení čidel se provádí v testovacím režimu. Nejdříve nastavíme (trimry P1 a P2) proud lasery kousek nad bod, kdy začínají laserovat (od tohoto bodu se rychle zvětšuje svítivost se vzrůstajícím proudem). Nastavujeme raději menší proud.
Poté nasměrujeme lasery a čidla proti sobě a připojíme čidla s elektronikou. Při zapnutí tržíme tlačítko TEST a tím přejdeme do testovacího režimu, kdy časomíra vydává tón jakmile je paprsek přerušený. Trimry P3 a P4 nastavují rozhodovací úroveň čidel. Správně nastavená čidla reagují na předmět o tloušťce cca 1mm i při vzdálenosti čidel 5m od sebe.
Po zresetování je časomíra připravena k činnosti.
Programové vybavení
Uživatelský popis
Časomíra má jediný úkol. Při aktivaci čidla START spustit měření času a při aktivaci čidla STOP zobrazit změřený čas a výsledek odeslat nadřazenému počítači přes sériovou linku RS232 (rychlostí 9600Bd 8 bitů bez parity a bez řízení přenosu). Kromě toho časomíra při každé aktivaci čidla krátce pípne.
Aby bylo možné snadno seřídit čidla má program ještě testovací režim, při kterém vydává tón po celou dobu aktivace čidel. Do testovacího režimu se vstupuje tehdy, pokud je stlačeno tlačítko TEST (SW3) v okamžiku zapnutí časomíry. Testovací režim se ukončuje vypnutím časomíry.
Jak program funguje vevnitř
Program pro procesor PIC byl napsán v jazyce C a přeložen pomocí překladače CCS (viz http://www.ccsinfo.com).
Program je řízen přerušením od změny stavu portu B na který jsou připojena čidla (a tlačítka). Stav programu je uložen ve stavové proměnné State_run a jsou celkem 3 stavy:
- 0) stav klidu (čeká se na signál START)
- 1) Stav běhu stopek (stopky běží a čeká se na signál STOP)
- 2) Stav po ukončení běhu stopek (stopky změřily čas a obsluhuje se zobrazení a přenos)
V režimu běhu stopek se čas čítá na základě přerušení od časovače. Perioda přerušení je 256us a čítač času je realizován tak, aby se právě 1x za hodinu protočil. Čas se průběžně zobrazuje v sekundách a milisekundách.
Při aktivaci signálu START nebo STOP se nastaví do proměnné Beep počet půlperiod pro pípnutí. Vlastní pípnutí se provádí v obsluze přerušení od časovače.
Protože procedura pro zobrazení času je velmi dlouhá (obsahuje převody čísel na řetězce a dělení) je tato procedura společná jak pro výpis na displej tak i pro přenos přes sériovou linku. Na které výstupy zobrazení půjde řídí stavová proměnná PutCharMode.
Testovací režim nepoužívá přerušení, je to obyčejná smyčka opakovaného čtení a generování pípání pomocí programově realizovaného zpoždění. Do testovacího režimu se vstupuje pokud při zapnutí stlačeno tlačítko TEST, testovací režim nelze ukončit jinak než vypnutím časomíry (resetem).
Hlavní program provádí tyto činnosti:
- Inicializace LCD a výpis verze jak na LCD tak i na RS232
- Inicializace vstupů s stavových proměnných
- Test a případné spuštění testovacího režimu
- Inicializace časovače
- Spuštění nekonečné hlavní smyčky
-
- Nulování čítače a stavové proměnné State_run
- Povolení obsluhy přerušení
- Čekání dokud nedojde k přechodu k jinému než klidovému stavu
- Po dobu běhu průběžné opakované vypisování času
- Po ukončení režimu běhu okamžité vypsání změřeného času
- Pauza (v této době ještě zní pípnutí od signálu STOP)
- Výpis změřeného času na RS232
Program je bohatě komentovaný a je proto snadné se v něm orientovat. Proto je podrobnější popis zbytečný.